Please Note: Prices subject to change without notice
71-3-L100-A : Motor - 3 phase, 44W, 4 pole, 41.5Vac, 50Hz, Wound Rotor(Slip Ring) Induction Motor (WRIM/SRIM)
Price: $1953 + freight & handling + GST
Note: for optimum performance the Secondary Rheostat (2550-3-100R) should be purchased with this motor
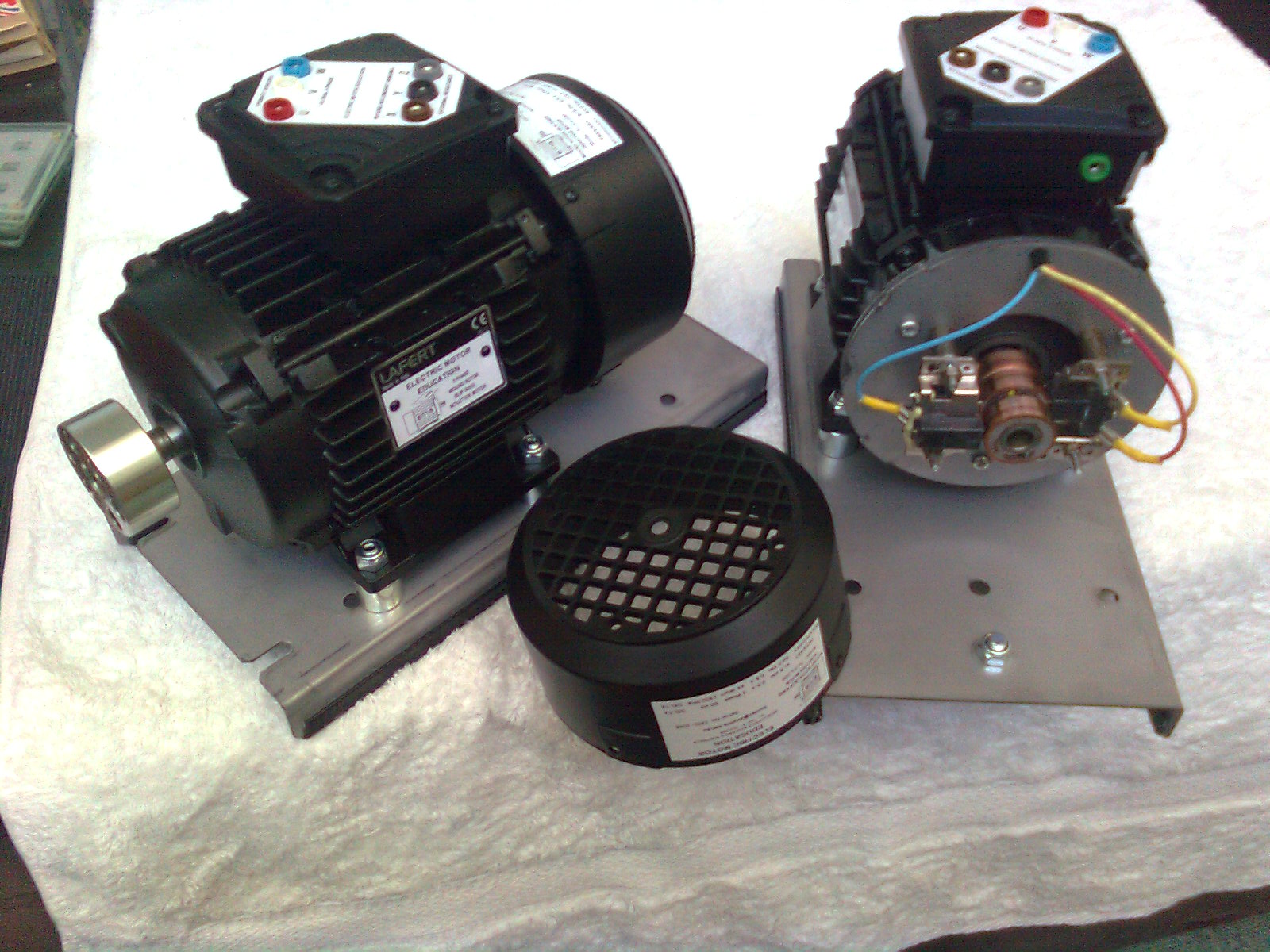
This is a 3ph, 41.5 Vac, 44W, 4 pole, 50Hz, Wound-Rotor(Slip-Ring) Induction Motor(WRIM/SRIM)
The motor has six(6) leads terminated at the terminal box with 4mm diam. sockets
3 from the internally Delta(Δ) connected Primary Winding and 3 from the internally Delta(Δ) connected Secondary Winding
Connecting the Secondary Rheostat (2550-3-100R) to the secondary winding enables the motor to develop the motors maximum torque at start (Locked-Rotor)
Also, The Secondary Rheostat (2550-3-100R) enables the variable speed (under load) characteristic to be demonstrated. With the inclusion of wattmeter(MI 7033), voltmeter, and ammeters in the circuit it can be clearly demonstrated when varying the speed with a constant load, that while the shaft output power changes with the speed (Power proportional to speed), the input power remains constant. The difference in the shaft output power to the input power can be shown to be being dissipated as heat in the Secondary Rheostat
i.e. P(input) = P(shaft) + P(rheostat)
It can also be demonstrated that the rotor speed(RPM) is maximum when the motor is unloaded. This characteristic is ideal for use on cranes the hook can be raised or lowered at maximum speed when unloaded, but speed control and maximum torque is available when raising or lowering a load.
It will be noted that the Secondary winding is Delta(Δ) connected rather than the more common Star(Y) connection. The method of the Secondary winding connection can be either Star(Y) or Delta(Δ) and is determined by the design engineer. For this motor practical and mechanical winding issues dictated that the Delta(Δ) connection be used. From a teaching perspective this is an advantage, as a practical demonstration of this alternative method of connection.
It should be noted by the teacher:
In designing and manufacturing this motor in such a small frame size and power rating, required the relative position of the Primary winding and Secondary winding to be reversed. i,e, the Primary winding is the rotating member(Rotor) and the Secondary winding is the stationary member(Stator). The re-positioning of these winding is not (and purposely so) obvious. Depending on the level of student knowledge, and to avoid confusion, teachers, at their discretion, may, or may not, wish to highlight this point to their students. However, the design, again, has the advantage of practically demonstrating this alternative design.
The superior performance of this 4th generation motor over the 3rd generation Betts model is primarily due to the re-positioning of the primary and secondary winding
PLEASE NOTE, the “eme” 4th generation motor has totally eliminated the 3rd generation Betts model’s two inherent design defects;
1. inability to obtain maximum torque at start(locked rotor) which was due to the wound rotors high internal resistance, and
2. the rotor “locking” or “cogging” in operation.
